Unity - shader의 직교 투영(Orthographic projection) 행렬(UNITY_MATRIX_P)을 수작업으로 구성
지난 글에서 다룬,
Unity - shader의 원근 투영(Perspective projection) 행렬(UNITY_MATRIX_P)을 수작업으로 구성
; https://www.sysnet.pe.kr/2/0/11695
원근 투영에 이어 이번에는 직교 투영 행렬에 대해 다뤄보겠습니다.
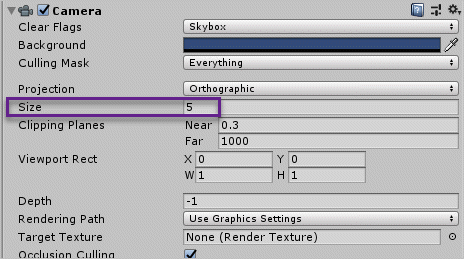
Main Camera의 Projection 설정을 "Orthographic"으로 바꾸고 shader를 디버깅해 보면 투영 행렬을 담은 2가지 변수에 대해 다음과 같은 decomposeProjection 값이 나옵니다.
[초기 Scene 화면의 기본값]
Size = 5
Near = 0.3
Far = 1000
카메라 위치 = (0, 1, -10)
camera.projectionMatrix.decomposeProjection
_top 5.000000000
_bottom -5.000000000
_left -8.911290000
_right 8.911290000
_near 0.299959800
_far 1000.000000000
GL.GetGPUProjectionMatrix(camera.projectionMatrix, true).decomposeProjection
_top -5.000000000
_bottom 5.000000000
_left -8.911290000
_right 8.911290000
_near 1999.700000000
_far 0.299959800
원근 투영과 달라진 점이 있다면, Unity의 Inspector 화면에서 원근 투영에 있던 FOV 옵션이 없어지고 근-평면과 원-평면의 크기를 나타내는 Size가 새로 생겼습니다. 그리고 위의 설정일 때 shader의 glstate_matrix_projection, unity_CameraWorldClipPlanes 내장 변수의 값은 다음과 같습니다.
glstate_matrix_projection = [0.112217200 0.0 0.0 0.0;
0.0 -0.2 0.0 0.0;
0.0 0.0 0.001000300 1.000300000;
0.0 0.0 0.0 1.0]
unity_CameraWorldClipPlanes[0] x = 1.000000000, y = 0.000000000, z = 0.000000000, w = 8.911290000
unity_CameraWorldClipPlanes[1] x = -1.000000000, y = 0.000000000, z = 0.000000000, w = 8.911290000
unity_CameraWorldClipPlanes[2] x = 0.000000000, y = -1.000000000, z = 0.000000000, w = 6.000000000
unity_CameraWorldClipPlanes[3] x = 0.000000000, y = 1.000000000, z = 0.000000000, w = 4.000000000
unity_CameraWorldClipPlanes[4] x = 0.000000000, y = 0.000000000, z = -1.000000000, w = 1989.700000000
unity_CameraWorldClipPlanes[5] x = 0.000000000, y = 0.000000000, z = 1.000000000, w = 9.700010000
이번에도 역시 OpenGL을 따르는 투영 행렬과 유니티가 실행하는 환경에서의 투영 행렬 공식이 달라질 수 있는데 제 테스트 환경에서는 다음과 같습니다.
[OpenGL을 따르는 투영 행렬]
${
P = \begin{bmatrix} \frac {2} {r - l} & 0 & 0 & 0 \\ 0 & \frac {2} {t - b} & 0 & 0 \\ 0 & 0 & \frac {-2} {f - n} & \frac {-(f + n)} {f - n} \\ 0 & 0 & 0 & 0 \end{bmatrix}
}$
[실행 환경에 맞는 투영 행렬 - 아래는 DirectX를 사용하는 윈도우 환경에서의 투영 행렬]
${
P = \begin{bmatrix} \frac {2} {r - l} & 0 & 0 & 0 \\ 0 & \frac {-2} {t - b} & 0 & 0 \\ 0 & 0 & \frac {1} {f - n} & \frac {f} {f - n} \\ 0 & 0 & 0 & 0 \end{bmatrix}
}$
실제로 camera.projectionMatrix.decomposeProjection의 값을 위의 투영 행렬 공식에 대입하면 다음과 같은 값들이 나옵니다.
[OpenGL을 따르는 투영 행렬]
${
P = \begin{bmatrix} 0.112217200 & 0 & 0 & 0 \\ 0 & 0.2 & 0 & 0 \\ 0 & 0 & -0.002000600 & -1.000600099 \\ 0 & 0 & 0 & 0 \end{bmatrix}
}$
[실행 환경에 맞는 투영 행렬 - 아래는 DirectX를 사용하는 윈도우 환경에서의 투영 행렬]
${
P = \begin{bmatrix} 0.112217200 & 0 & 0 & 0 \\ 0 & -0.2 & 0 & 0 \\ 0 & 0 & 0.001000300 & 1.000300049 \\ 0 & 0 & 0 & 0 \end{bmatrix}
}$
이것을 shader 코드에서 구현하는 방법은 투영 행렬과는 다소 다릅니다. 왜냐하면 직교 투영을 하는 경우 FOV가 아닌 단순 직육면체를 나타내는 절두체의 크기를 구해야 하기 때문입니다.
다행히 이 크기는
unity_OrthoParams에서 구할 수 있습니다.
이름: unity_OrthoParams
형식: float4
설명:
x is orthographic camera’s width
y is orthographic camera’s height
z is unused
w is 1.0 when camera is orthographic, 0.0 when perspective.
따라서 shader에서는 다음과 같이 투영 행렬을 재구성할 수 있습니다.
v2f vert (appdata v)
{
float4 pos;
v2f o;
float orthoWidth = unity_OrthoParams.x;
float orthoHeight = unity_OrthoParams.y;
float nearPlane = _ProjectionParams.y;
float farPlane = _ProjectionParams.z;
float top = orthoHeight;
float bottom = -top;
float right = orthoWidth;
float left = -right;
float p00 = 2 / (right - left);
float p11 = -2 / (top - bottom);
float p22 = 1 / (farPlane - nearPlane);
float p23 = farPlane / (farPlane - nearPlane);
float4x4 projectionMatrix;
projectionMatrix[0] = float4(p00, 0, 0, 0);
projectionMatrix[1] = float4(0, p11, 0, 0);
projectionMatrix[2] = float4(0, 0, p22, p23);
projectionMatrix[3] = float4(0, 0, 0, 1);
pos = mul(unity_ObjectToWorld, v.vertex);
pos = mul(UNITY_MATRIX_V, pos);
pos = mul(projectionMatrix, pos);
// pos = mul(UNITY_MATRIX_P, pos);
o.vertex = pos;
return o;
}
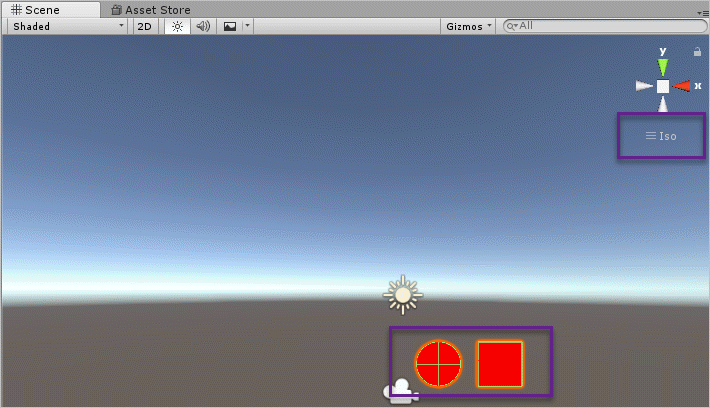
Unity의 Scene 디자인 화면에서 정상적으로 직교 투영 변환이 되었는지는 보기 방식을 "Iso(metric)"로 바꿔야 합니다.
[이 글에 대해서 여러분들과 의견을 공유하고 싶습니다. 틀리거나 미흡한 부분 또는 의문 사항이 있으시면 언제든 댓글 남겨주십시오.]