NodeMCU v1 ESP8266 - 펌웨어 내 파일 시스템(SPIFFS, LittleFS) 및 EEPROM 활용
Sketch 프로그램을 기기에 업로드한 후 고정된 프로그램이 실행되면서, 때로는 (데스크톱 운영체제 수준은 아니겠지만) 간단한 파일을 다루고 싶을 때가 있습니다. ESP8266 기기의 경우 이를 위해 SPIFFS(Serial Peripheral Interface Flash File System), LittleFS(Little Fail-Safe) 2가지 방식으로 접근할 수 있는데요,
Install ESP8266 Filesystem Uploader in Arduino IDE
; https://randomnerdtutorials.com/install-esp8266-filesystem-uploader-arduino-ide/
Install ESP8266 NodeMCU LittleFS Filesystem Uploader in Arduino IDE
; https://randomnerdtutorials.com/install-esp8266-nodemcu-littlefs-arduino/
littlefs-project/littlefs
; https://github.com/littlefs-project/littlefs
현재 SPIFFS는 deprecated 상태이고 이후 LittleFS 사용이 권장된다고 합니다. 기본적으로 이러한 파일 시스템 용으로 공간이 할당되는데, 아두이노 IDE에서 "Tools" / "Flash Size" 메뉴를 이용해 확인할 수 있습니다.
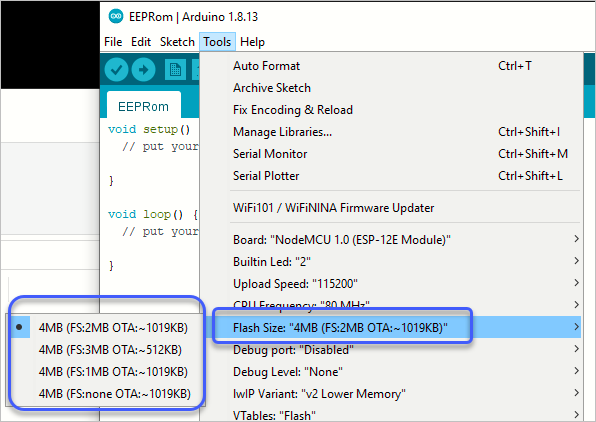
위에서 보면 4가지 옵션이 나오고 선택은 첫 번째 항목으로 되어 있는데요,
- 4MB (FS:2MB OTA:~1019KB)
- 4MB (FS:3MB OTA:~512KB)
- 4MB (FS:1MB OTA:~1019KB)
- 4MB (FS:none OTA:~1019KB)
제가 가진 NodeMCU v1 ESP8266 개발 보드는 총 4MB의 플래시 크기를 갖기 때문에 모두 4MB라고 보입니다. (플래시 영역의 크기 및 Sketch 프로그램의 크기는 업로드 시
출력 결과를 통해서도 알 수 있습니다.)
"4MB (FS:2MB OTA:~1019KB)"는 파일 시스템 영역으로 2MB 할당하고 Sketch 프로그램의 영역으로 1019KB를 할당하고 있습니다. 그렇다면 1MB 정도의 영역이 남는데요, 이런 식으로 되는 것은 (저도 잘은 모르겠지만) Sketch 프로그램의 용량에 준하는 영역을 미리 예약하기 때문이라고 합니다. (즉, 현재 실행 중인 Sketch 영역과 새로 업데이트 되는 프로그램의 영역이 필요한 것입니다.)
"4MB (FS:3MB OTA:~512KB)"의 경우에는 파일 시스템 영역을 3MB까지 할당했기 때문에 Sketch 프로그램의 크기가 최대 512KB로 제한되고, 그와 동일한 크기로 512KB가 예비되는 것입니다. 반면, "4MB (FS:1MB OTA:~1019KB)" 항목이나, "4MB (FS:none OTA:~1019KB)"은 무슨 의미가 있는지 잘 모르겠습니다. 왜냐하면 Sketch의 최대 크기는 1MB로 제한이 되어 있기 때문에 결국 파일 시스템 용도로 할당하지 않는 다른 공간은 낭비가 되기 때문입니다. (혹시 이에 대해 기술적인 내용을 아시는 분은 덧글 부탁드립니다. ^^)
암튼, 저 공간을 SPIFFS, LittleFS 라이브러리를 이용해 자유롭게 사용하시면 됩니다.
때로는, 파일 시스템 정도는 아니고 더 작은 데이터를 유지하고 싶을 때도 있을 텐데요, 이런 경우는 512 바이트 고정 크기로 마련된 EEPROM을 사용하는 것도 가능합니다.
Read and write to the eeprom on the ESP8266
; http://www.esp8266learning.com/read-and-write-to-the-eeprom-on-the-esp8266.php
실제 사용 코드는 대략 다음과 같은 식으로 간단한 I/O를 할 수 있습니다.
#include <EEPROM.h>
void setup()
{
Serial.begin(115200);
EEPROM.begin(512);
char *text = "test";
writeRom(0, text, strlen(text));
}
void loop()
{
char buf[5] = { 0 };
readRom(0, buf, 4);
println(buf);
delay(5000);
}
void println(char *text)
{
Serial.write(text);
Serial.write('\n');
}
void writeRom(int address, char *text, int textLen)
{
for (int i = 0; i < textLen; i ++)
{
EEPROM.write(address + i, text[i]);
}
}
void readRom(int address, char buffer[], int bufLen)
{
for (int i = 0; i < bufLen; i ++)
{
buffer[i] = EEPROM.read(address + i);
}
}
/* 출력 결과
(5초마다 test 문자열 출력 반복)
*/
이번에 검색하면서 알게 된 건데, ESP8266 보드 관련한 대부분의 프로젝트가 아래의 사이트에 실려 있으니,
120+ ESP8266 NodeMCU Projects, Tutorials and Guides with Arduino IDE
; https://randomnerdtutorials.com/projects-esp8266/
참고하시면 도움이 될 것입니다. ^^
[이 글에 대해서 여러분들과 의견을 공유하고 싶습니다. 틀리거나 미흡한 부분 또는 의문 사항이 있으시면 언제든 댓글 남겨주십시오.]