New NodeMcu v3(ESP8266)의 IR LED (적외선 송신) 제어
아두이노에서 IR LED 제어에 대해서는 이전 글에서 이미 다룬 적이 있습니다.
아두이노에서 적외선 수신기 기본 사용법
; https://www.sysnet.pe.kr/2/0/11670
아두이노에서 적외선 송신기 기본 사용법
; https://www.sysnet.pe.kr/2/0/11671
ESP8266의 경우라면 어떨까요? 아두이노의 경우 핀 번호에 "~" 물결무늬가 있는 것은 PWM 신호를 출력할 수 있는 Digital Pin을 의미한다고 다음의 글에 자세하게 설명하고 있습니다.
아두이노 기초 강좌 6 - analog 값 읽기, 쓰기
; http://www.hardcopyworld.com/ngine/aduino/index.php/archives/1040
아두이노가 가진 Digital 핀 중 PWM 기능을 가진 핀들이 이미 정의되어 있습니다. 아두이노 보드에 있는 각각의 핀 아래에는 핀 번호가 적혀있는데 PWM 기능을 가진 핀은 앞에 (~) 물결 마크가 붙어 있습니다. 아래 그림에서 보듯3, 5, 6, 9, 10, 11번 핀이 PWM 핀이죠. (UNO 보드 기준이며, 보드 종류에 따라 PWM 핀이 틀려집니다)
...
정리를 하면… analogRead() 함수를 사용해서 단계적인 값을 읽을 때는 아날로그 핀들을 사용하면 됩니다. 하지만 아날로그 핀을 통해 단계적인 0V~5V 사이의 값을 출력할 수는 없습니다. 이런 작업은 PWM 핀으로 지정된 digital 핀을 통해서 가능합니다. 이 때 analogWrite() 함수를 사용할 수 있습니다.
그런데 제가 가지고 있는 LiLon Node Mcu v3(ESP8266)에는,
[그림 출처:
https://www.instructables.com/id/Getting-Started-With-ESP8266LiLon-NodeMCU-V3Flashi/]
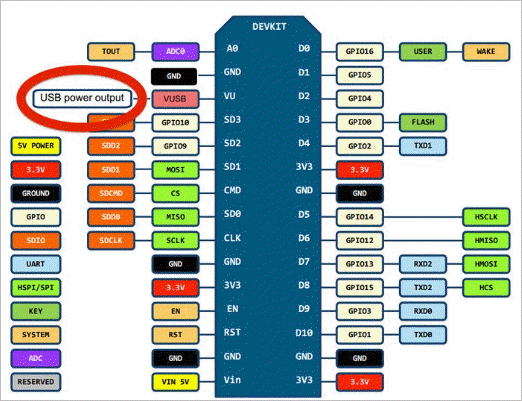
보다시피, "~" 표시가 하나도 없습니다. 다행히 검색해 보면,
ESP8266 Arduino Core
; http://esp8266.github.io/Arduino/versions/2.0.0/doc/reference.html
(정확히 LiLon Node Mcu에 대한 문서는 아니지만) 0 ~ 16번 핀까지 모두 PWM 사용이 가능하다고 합니다. 실제 동작하는지 여부는... 그냥 해보면 알 수 있지 않겠습니까? ^^
테스트를 위해 우선 IR 제어 라이브러리를 구해야 하는데요, 아두이노에서는 "shirriff"라는 사람이 만든 "IRRemote"를 사용했지만,
z3t0/Arduino-IRremote
; https://github.com/z3t0/Arduino-IRremote
ESP8266의 경우에는 별도로 "Sebastien Warin, Mark Szabo, Ken Shirriff, David Conran" 사람들이 만든 "IRremoteESP8266"을 사용해야 합니다.
markszabo/IRremoteESP8266
; https://github.com/markszabo/IRremoteESP8266
사용법도 살짝 다른데, 우선 "Include Library"로 인해 추가되는 헤더가 다음과 같이 제법 많습니다.
#include <ir_Argo.h>
#include <ir_Coolix.h>
#include <ir_Daikin.h>
#include <ir_Fujitsu.h>
#include <ir_Gree.h>
#include <ir_Haier.h>
#include <ir_Kelvinator.h>
#include <ir_LG.h>
#include <ir_Magiquest.h>
#include <ir_Midea.h>
#include <ir_Mitsubishi.h>
#include <ir_NEC.h>
#include <ir_Panasonic.h>
#include <ir_Samsung.h>
#include <ir_Toshiba.h>
#include <ir_Trotec.h>
#include <IRrecv.h>
#include <IRremoteESP8266.h>
#include <IRsend.h>
#include <IRtimer.h>
#include <IRutils.h>
초기화 시, PWM Output으로 사용할 Pin 번호를 입력해야 하는데 제 경우에는 (보드에서는 D2라고 표기된) GPIO 4번을 선택해 다음과 같이 설정했습니다.
const int _khz = 38;
uint16_t _signal[] = { 3550, 1750, 600, 400, 600, 1800, 550, 450, 600, 450, 600, 1800, 550, 450, 600, 450, 600, 500, 600, 450, 600, 400, 650, 400, 550 };
const uint16_t _kIrLed = 4;
IRsend _irsend(_kIrLed);
그다음, setup에서 begin 함수를 호출하고,
void setup()
{
_irsend.begin();
}
이후 신호의 종류에 따라 send... 류의 함수를 호출하면 됩니다. 제 경우에는 sendRaw를 다음과 같은 식으로 호출했습니다.
void loop()
{
if (...[조건을 만족하면]...)
{
// IR 신호 송신
int signalLen = sizeof(_signal) / sizeof(uint16_t);
_irsend.sendRaw(_signal, signalLen, _khz);
}
}
남은 것은 이제 IR LED를 물리적으로 연결하는 것인데요, 일단 회로 배치는 다음과 같이 했습니다.
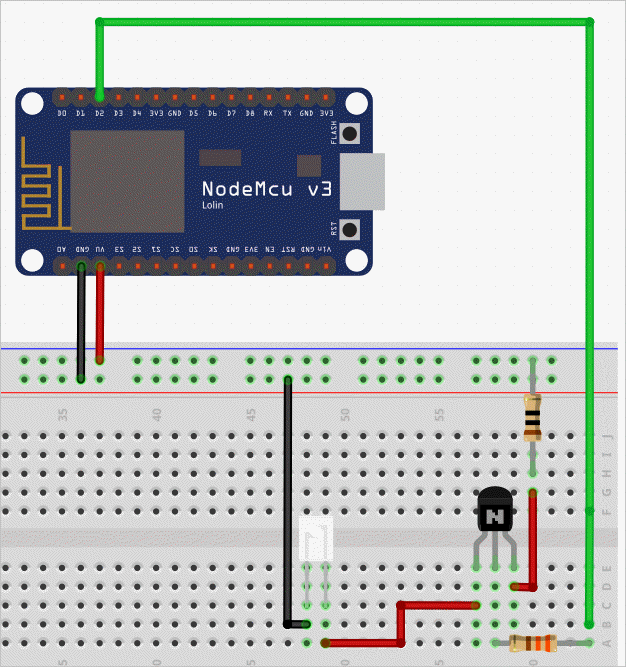
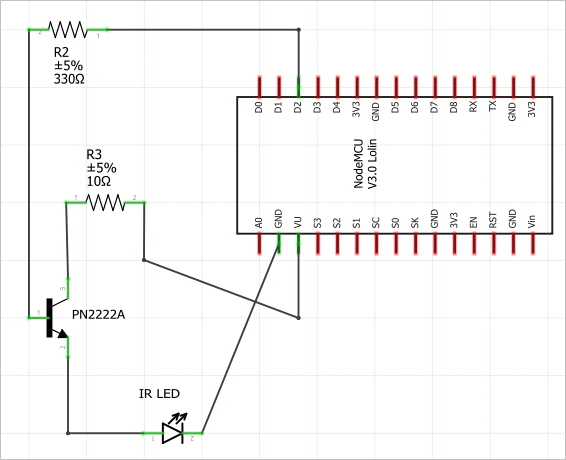
위의 회로에서 특이한 것은 회로에 공급할 전원을 NodeMCU의 VU 핀에서 얻었다는 점입니다. 아두이노의 경우 3.3V와 5V 전원 핀이 명시적으로 있는 반면 NodeMCU의 경우에는 (보드에는 3V3이라고 표기된) 3.3V 핀이 있지만 5V 핀은 없습니다. 이에 대해 검색해 보면 다음의 글이 나오는데요.
NodeMCU - Vin pin as 5V output?
; https://arduino.stackexchange.com/questions/51873/nodemcu-vin-pin-as-5v-output
NodeMCU는 (보드에 5V 전원을 공급하는) USB 단자와 VIN 핀이 직접 연결되어 있기 때문에 그것을 사용하면 된다고 합니다. 그런데 실제로 VIN 핀과 GND 핀의 전압을 재보면 약 2.1V가 나옵니다. 반면 VU 핀과 GND 핀을 재면 약 4.89V가 나오므로 그것을 연결하게 되었습니다.
그리고 실제로 잘 동작합니다. ^^
(
첨부 파일은 이 글의 회로도를 담은 fzz 파일입니다.)
참고로, IR에 대한 다음의 글도 읽어보시면 도움이 될 것입니다.
IR 적외선 무선통신 기초회로 및 로봇 원격 제어하기 실습
; https://robobob.co.kr/64
위의 예제에 사용한 IR LED의 규격이 "정격 1.36V, 최대 1.7V, 피크주파수 940nm, 화각+/-20도"라고 하는데 그냥 눈에 익혀두면 좋을 것 같습니다. ^^
[이 글에 대해서 여러분들과 의견을 공유하고 싶습니다. 틀리거나 미흡한 부분 또는 의문 사항이 있으시면 언제든 댓글 남겨주십시오.]